Go2 and Isaac Sim
Demo available here. Note: registration required.
Overview
The Go2 is a quadruped robot by Unitree. The robot is available in Isaac Sim, making it relatively simple to start running your own simulations.
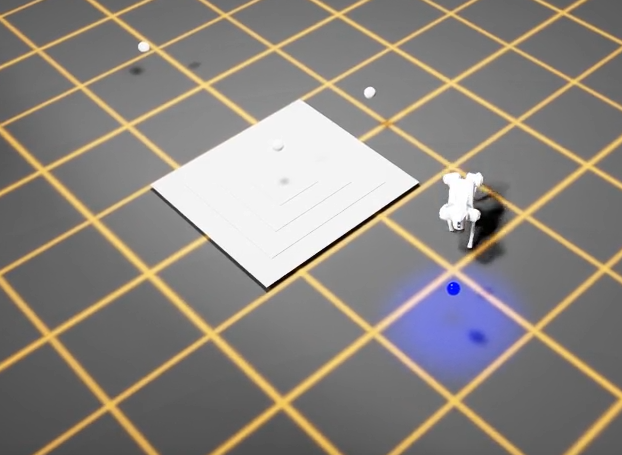
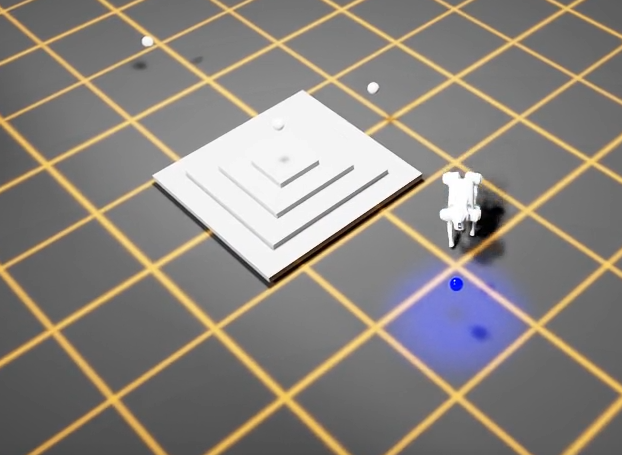
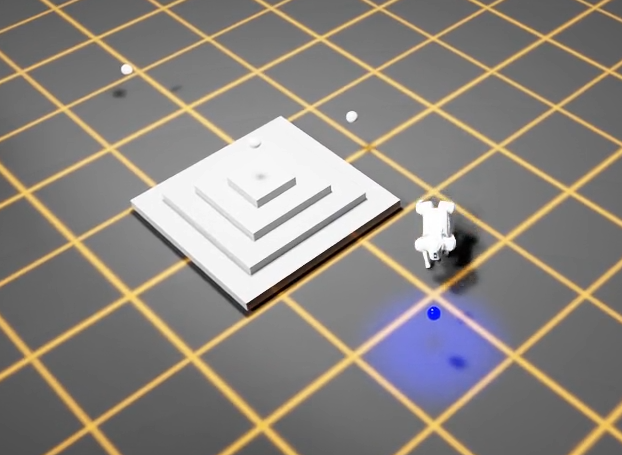
In this demo, we will conduct a waypoint mission, asking the go2 to navigate a series of waypoints in multiple environments:
- A generated pyramid with varying height (0.1m, 0.7m, and 1.1m)
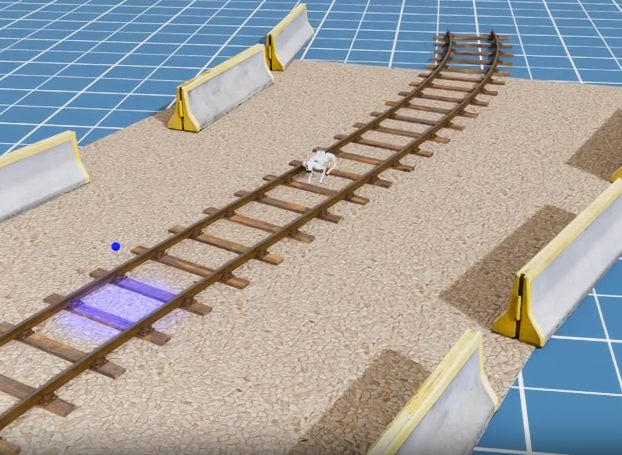
- 3 differing environments: on a railway track, some stone stairs, and an excavation site


The full project source is available on GitHub. The project is run using:
- dora-rs(robotics framework)
- Isaac Sim(simulator)
- pytest(writing tests)
- Artefacts(test automation and results review)
We will use two RL policies for the test, a “baseline” (which we would expect to successfully reach all waypoints) and a “stumbling” (which we do not).
Writing the Test
The testfile test_Waypoints_poses.py contains three tests:
- The first checks whether the environment correctly loaded in.
Scene Loading Test
@pytest.mark.clock_timeout(50)
def test_receives_scene_info_on_startup(node):
"""Test that the node receives scene info on startup."""
for event in node:
if event["type"] == "INPUT" and event["id"] == "scene_info":
# Validate scene info message
msgs.SceneInfo.from_arrow(event["value"])
return
The other two tests check whether the robot successfully reached all 4 waypoints in a given environment:
Variable Height Steps Test
For the pyramid with varying heights
@pytest.mark.parametrize("difficulty", [0.1, 0.7, 1.1])
@pytest.mark.clock_timeout(30)
def test_completes_waypoint_mission_with_variable_height_steps(
node, difficulty: float, metrics: dict
):
"""Test that the waypoint mission completes successfully.
The pyramid steps height is configured via difficulty.
"""
run_waypoint_mission_test(
node, scene="generated_pyramid", difficulty=difficulty, metrics=metrics
)
Note here we use pytest’s parametrize feature to set the differing heights
Photo-Realistic Environments Test
For the 3 “realistic” environments
@pytest.mark.parametrize("scene", ["rail_blocks", "stone_stairs", "excavator"])
@pytest.mark.clock_timeout(30)
def test_completes_waypoint_mission_in_photo_realistic_env(
node, scene: str, metrics: dict
):
"""Test that the waypoint mission completes successfully."""
run_waypoint_mission_test(node, scene, difficulty=1.0, metrics=metrics)
Note here we also use pytest’s parametrize feature to run the test against the 3 different environments.
Core Test Logic
The run_waypoint_mission_test() function that both tests call upon handles the core waypoint navigation logic:
def run_waypoint_mission_test(node, scene: str, difficulty: float, metrics: dict):
"""Run the waypoint mission test."""
transforms = Transforms()
node.send_output(
"load_scene", msgs.SceneInfo(name=scene, difficulty=difficulty).to_arrow()
)
waypoint_list: list[str] = []
next_waypoint_index = 0
metrics_key = f"completion_time.{scene}_{difficulty}"
start_time_ms = None
current_time_ms = None
stuck_detector = StuckDetector(max_no_progress_time=5000) # 5 seconds
for event in node:
# ... event processing loop
The function:
-
Loads the scene - Sends a
load_scenemessage with the specified environment and difficulty level (e.g., pyramid step height) -
Tracks waypoints - Maintains a list of waypoint frames and monitors which one the robot is currently targeting
-
Monitors robot pose - Listens for
robot_poseevents and calculates the distance to the current target waypoint using aTransformshelper -
Detects waypoint completion - When the robot gets within 0.6m of a waypoint, it advances to the next one
-
Detects stuck conditions - Uses a
StuckDetectorto fail the test if the robot hasn’t made progress for 5 seconds -
Records metrics - Captures the total completion time in seconds and stores it a
metrics.jsonfile, which will be displayed in the Artefacts Dashboard.
The test passes when all waypoints are reached, and fails if the robot gets stuck or times out.
The artefacts.yaml File
The artefacts.yaml sets up the test and parametrizes as follows:
project: artefacts-demos/go2-demo
version: 0.1.0
jobs:
waypoint_missions:
type: test
timeout: 20 # minutes
runtime:
framework: other
simulator: isaac_sim
scenarios:
settings:
- name: pose_based_waypoint_mission_test
params:
policy:
- baseline
- stumbling
metrics: metrics.json
run: "uv run dataflow --test-waypoint-poses"
Key points from above:
- The test(s) will run twice based on the
paramssection of theartefacts.yamlfile. Once using the “baseline” policy, the other using the “stumbling” policy. - The metrics collected will be saved to
metrics.json(as defined inmetrics:), to then be uploaded to the Artefacts Dashboard - We use the
run:key to tell artefacts how to launch the tests, as although the test framework ispytest, it will be ran through the dora-rs framework. For more details on ‘run’ see scenarios configuration
Results
As expected, the Baseline policy passed, while the Stumbling policy failed
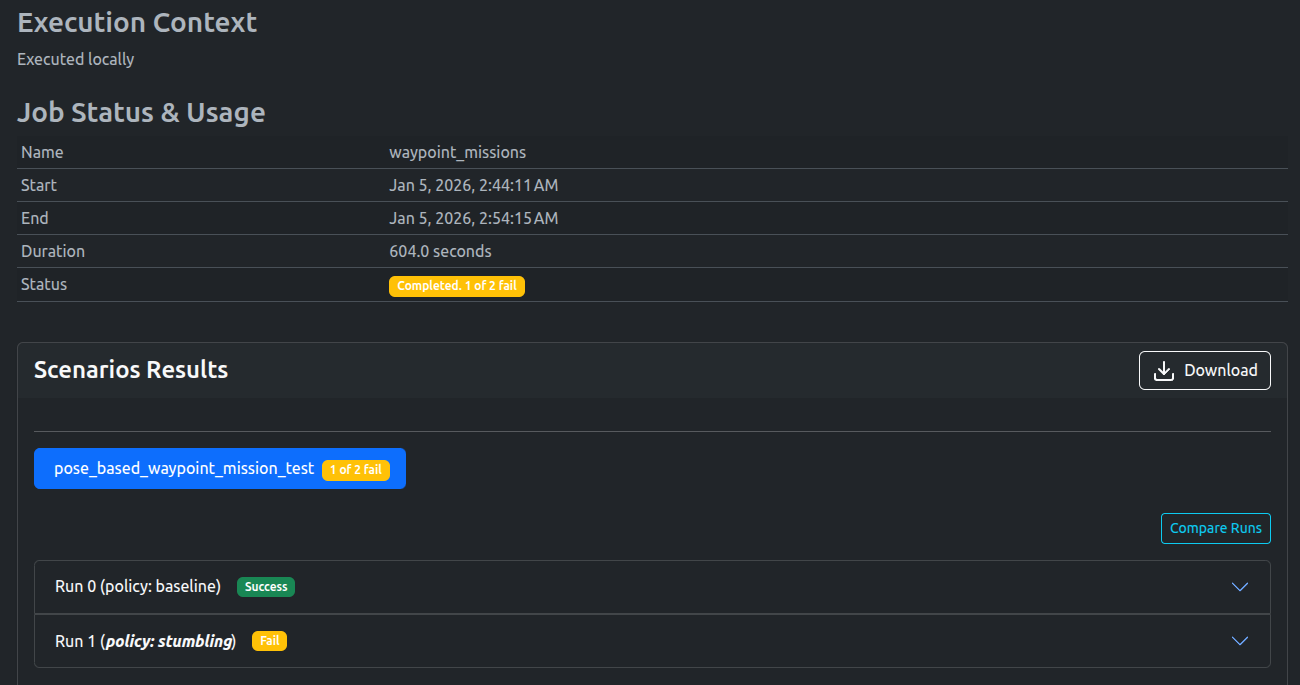
A video of the successful waypoint missions can be viewed below:
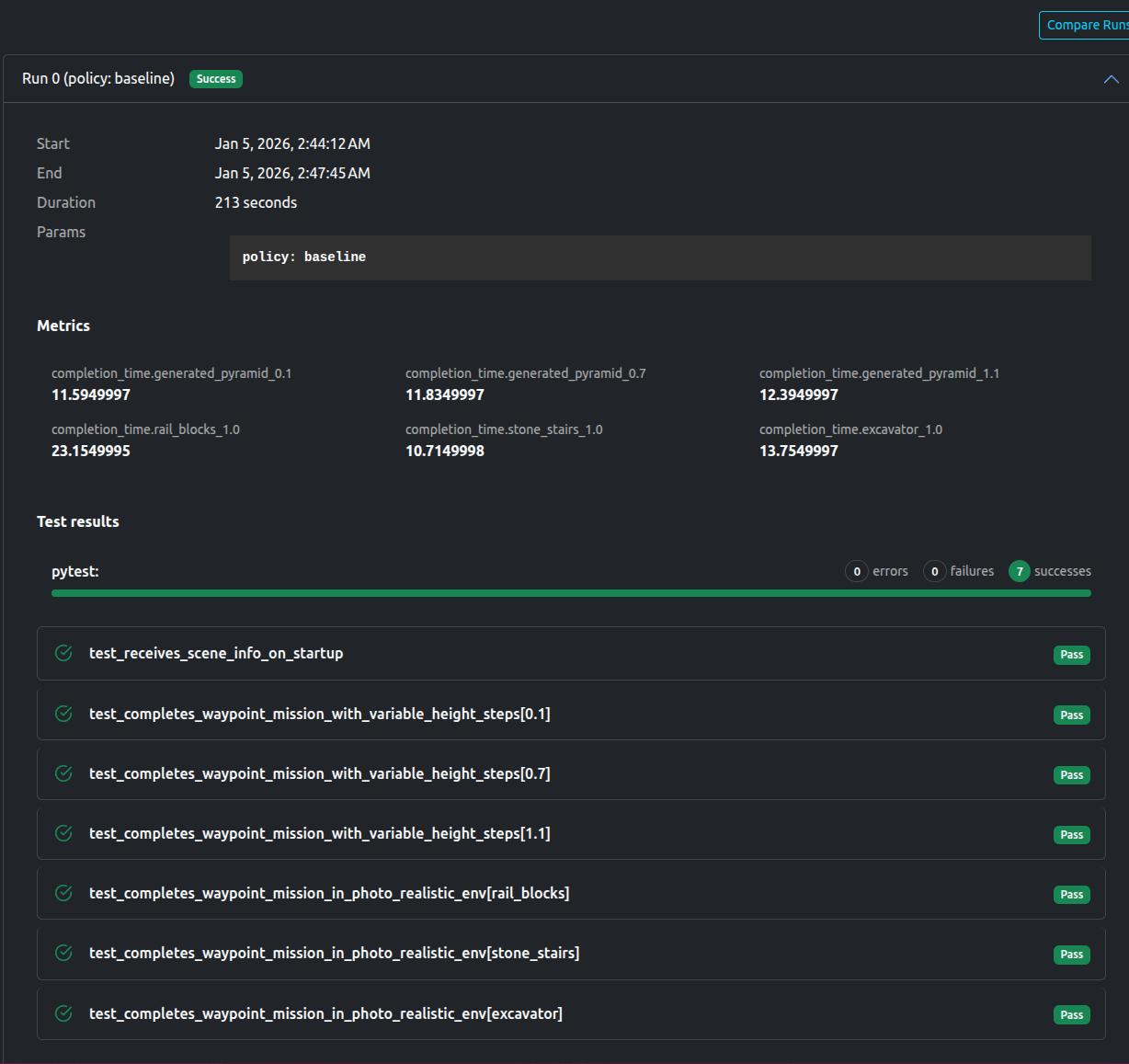
Baseline Policy
The dashboard shows all tests passed, as well as the aforementioned metrics (completion time) for each environment.
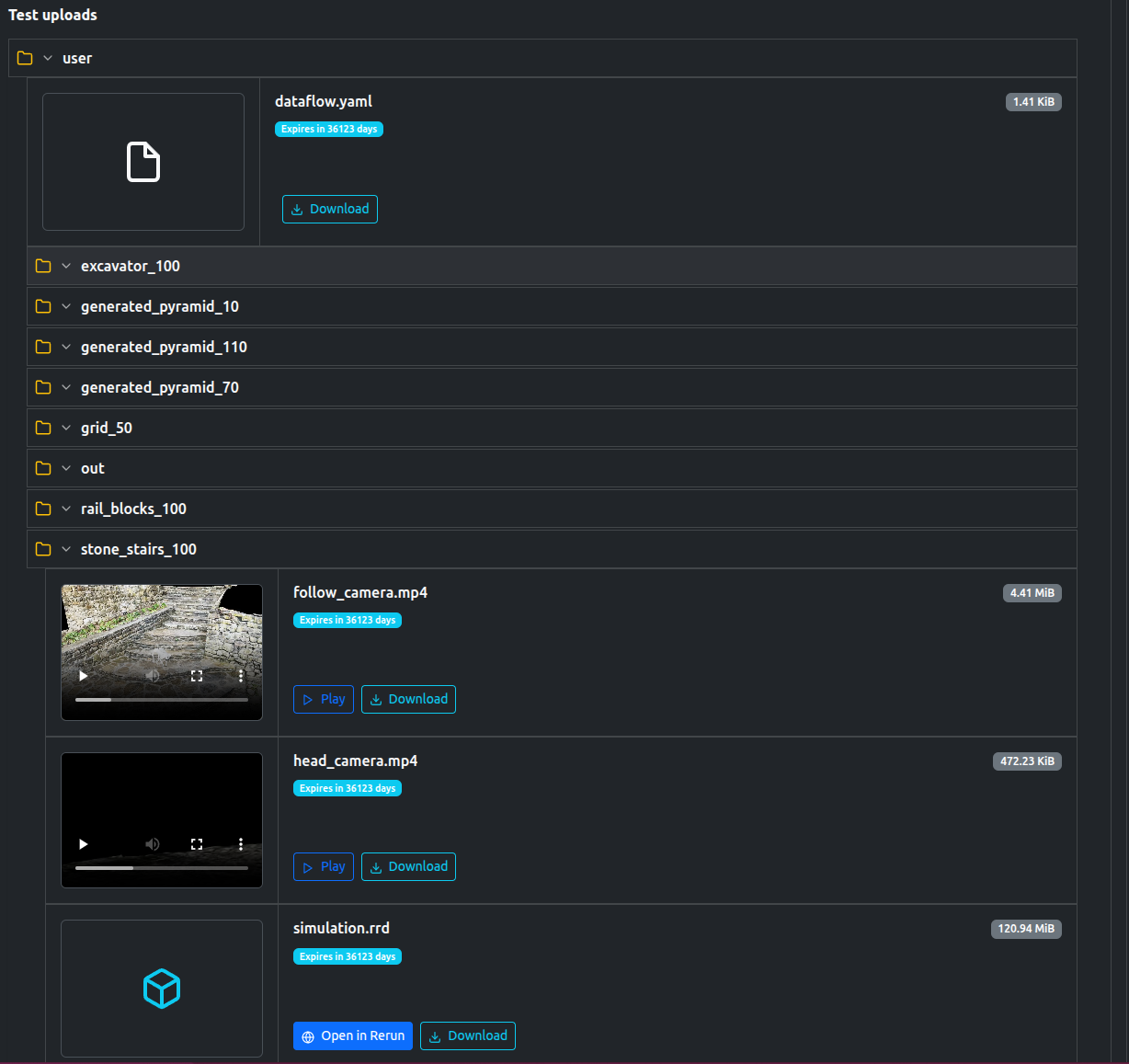
The tests also uploaded a number of artifacts, including videos, logs, as well a rerun file to replay the simulation if desired.
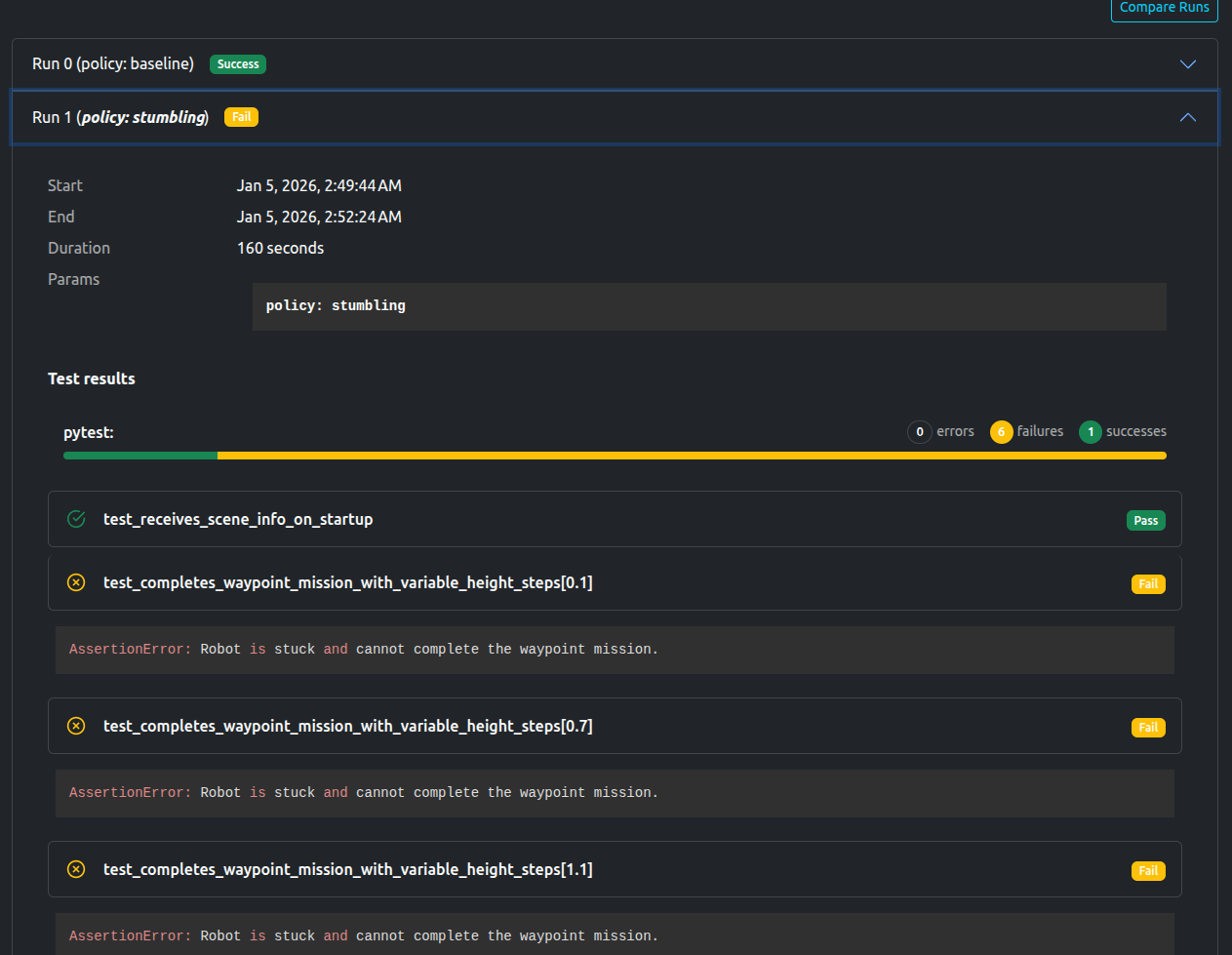
Stumbling Policy
The dashboard shows that only scene loading test passes, with the rest failing. The AssertionError “AssertionError: Robot is stuck and cannot complete the waypoint mission.” is also noted.
You are free to view the final results and associated metrics and uploads here (registration required)
Data available after the tests
- Rerun File
- Logs
- Videos and images of each scene.
- Metrics in
jsonformat
Artefacts Toolkit Helpers
For this project, we used the following helpers from the Artefacts Toolkit:
get_artefacts_params: to determine which traing policy to use.