OpenRMF Example
OpenRMF Example
Demo available here.. Note: Registration required.
Overview
OpenRMF is a framework for multi robot interoperability in large buildings. One common configuration task in OpenRMF is to set up Places and navigation lanes for the robots in a building.
Here we run the OpenRMF demo on the office world.
As shown below, this map has 14 waypoints where a robot can go. It also comes with 2 “tinyRobot"s starting on their respective chargers.
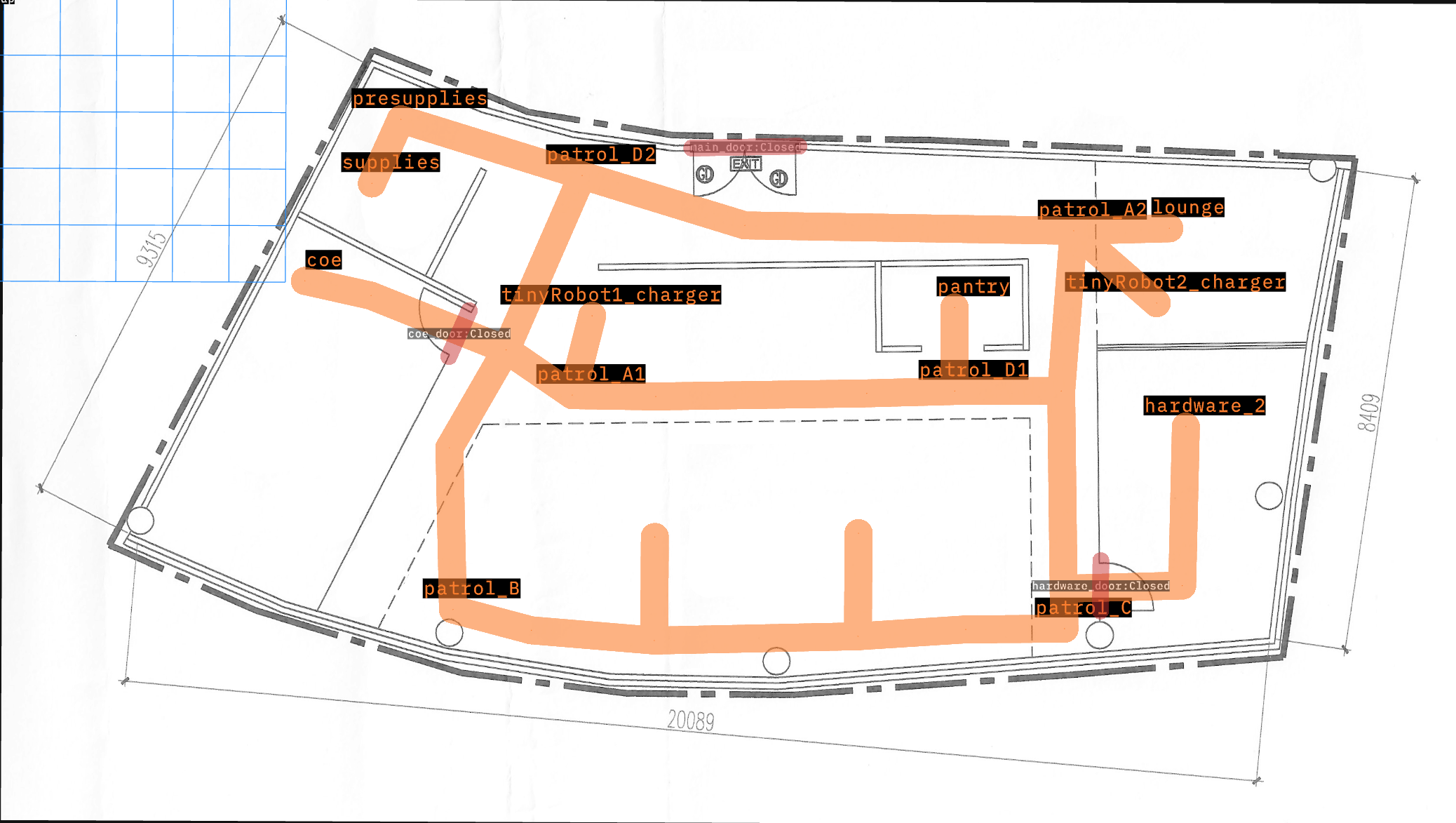
The goal of this test demo is to send every robot to every waypoint, and assert that it arrives. Failure indicates that a robot is unable to reach a place on the map.
The test is parametrized to run through all robots and waypoints, resetting the simulation between each run.
Quick analysis
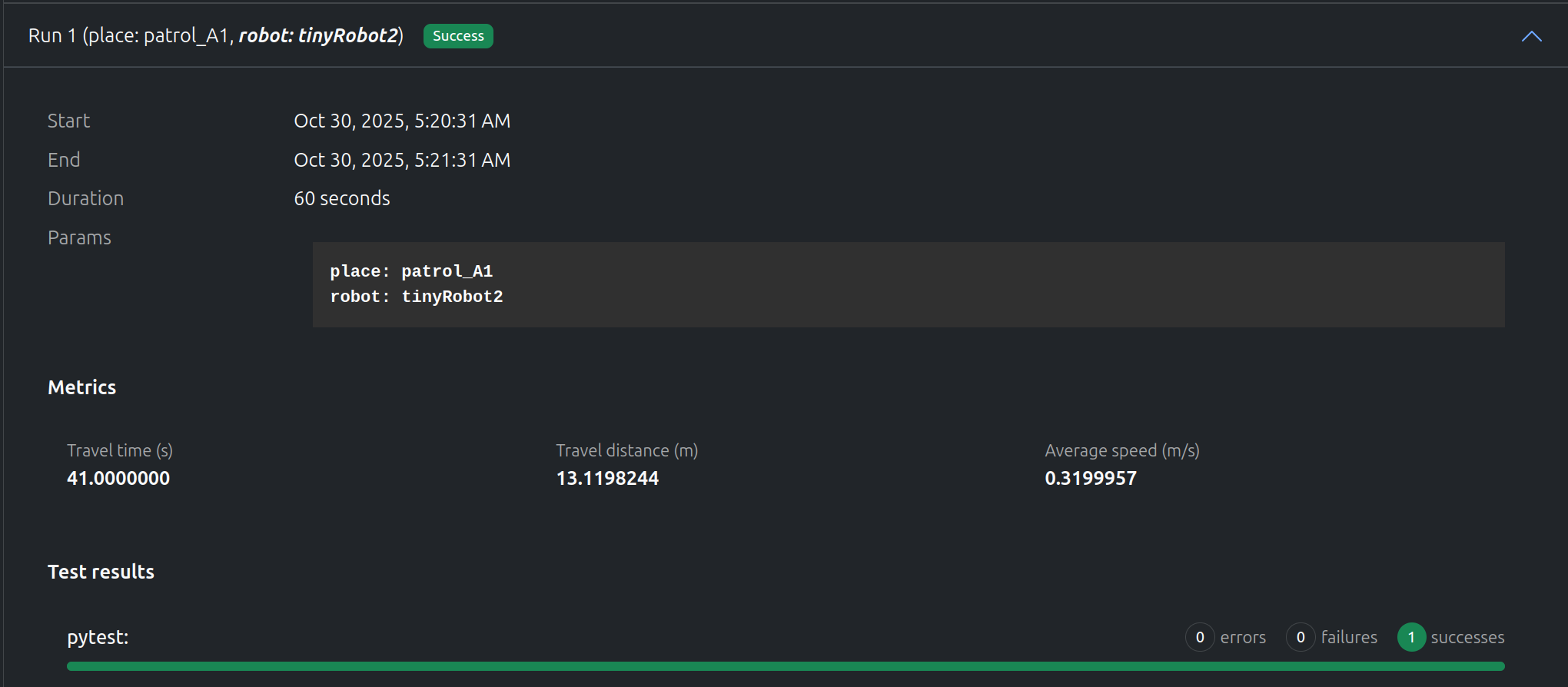
“tinyRobot2” going to “patrol_A1”
“tinyRobot2” successfully reached “patrol_A1” in ~40s. The video offers additional information on the how well the test executed.
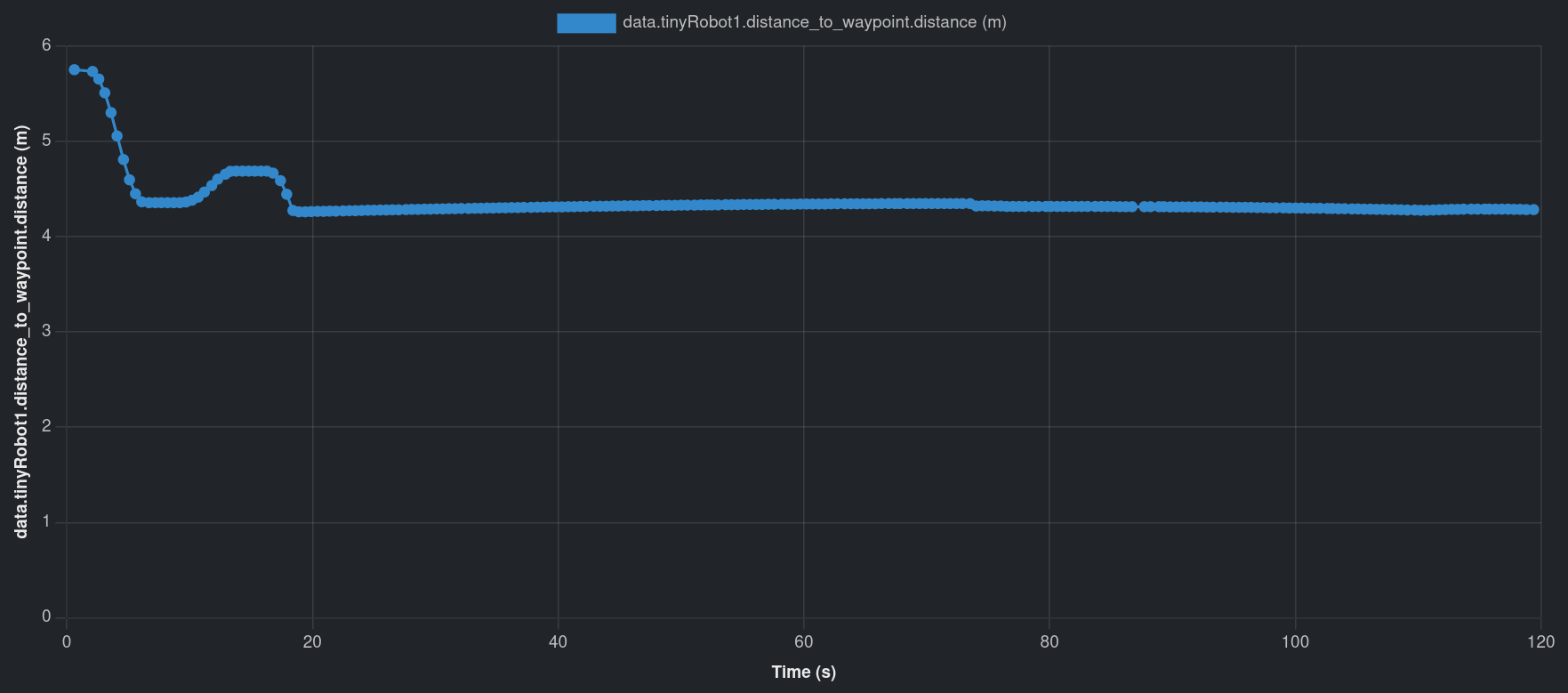
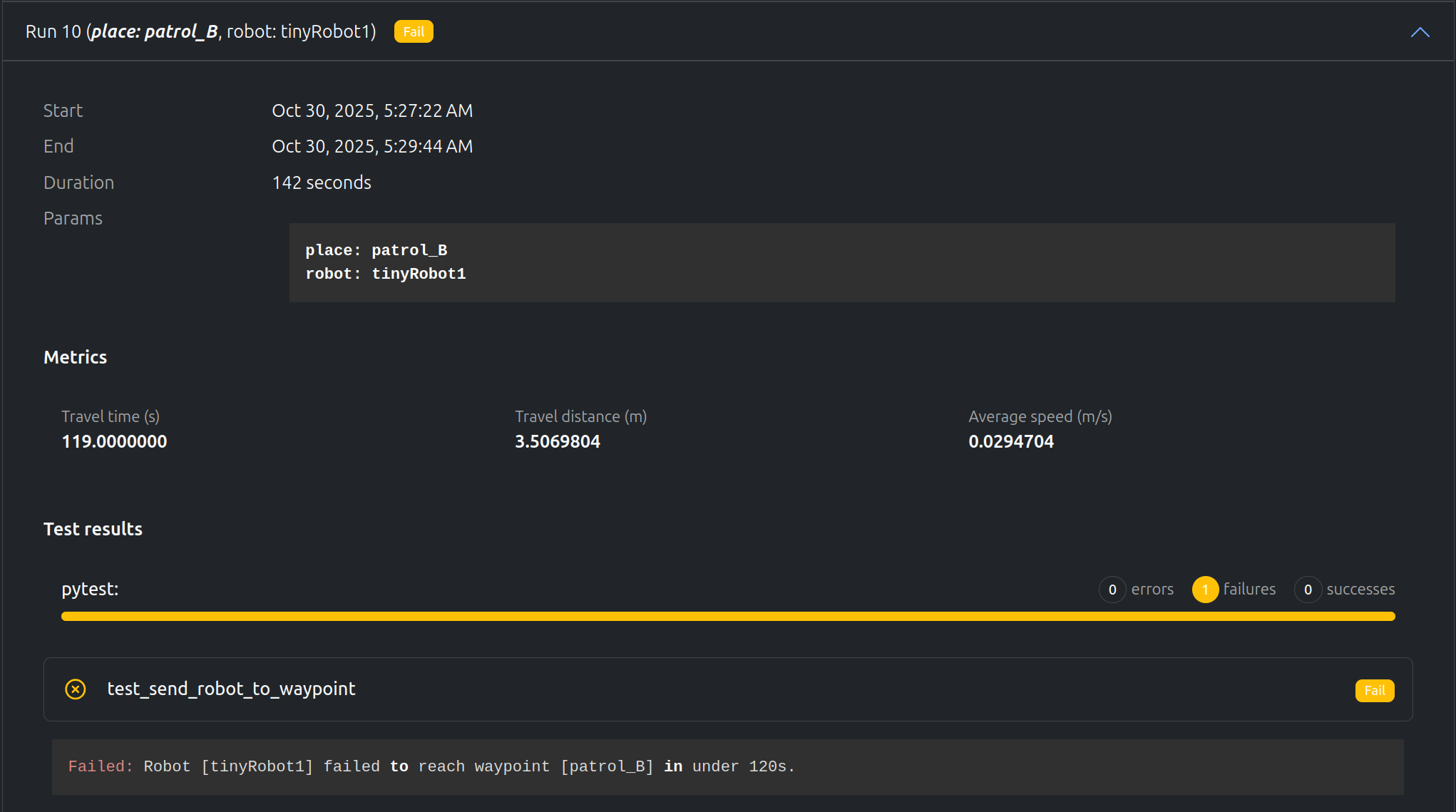
“tinyRobot1” going to “patrol_B”
However, “tinyRobot1” could not reach “patrol_B” before the timeout of 120 s. Using the video, we notice that there is a trashcan on the way, so the robot gets stuck on it. The distance graph also points towards the robot being stuck somewhere.
Data available after the tests
The tests record a few metrics:
- Time to reach the goal (simtime)
- Total distance traveled
- Average speed
The tests record multiple data:
- ROSbag.
- Video of the active robot in Gazebo.
- Graph of:
- The XY position.
- The distance to the goal.
- The distance traveled over time.
- Custom data dump from python to record data not available in the ROSbag.
- Debug log from the tests files.
- (Optional) stdout of the simulation and OpenRMF terminal.